



IBT-2 BTS7960B Motor Driver Module
The IBT-2 BTS7960B Motor Driver Module is a robust dual H-bridge driver designed for controlling high-current brushed DC motors in robotics, electric vehicles, automation systems, and heavy-duty Arduino projects. Based on two BTS7960B chips, it supports a continuous current of 43A with thermal protection, making it suitable for demanding applications that require speed, direction, and braking control.
This module works seamlessly with Arduino, Raspberry Pi, and ESP32, offering simple interfacing using logic-level PWM signals. With its PWM frequency support up to 25kHz, it allows precise motor speed control. Additionally, it features built-in over-temperature and short-circuit protection, ensuring long-term reliability.
Ideal for controlling motors in DIY robotic arms, electric go-karts, motorized doors, and CNC machines, this driver provides industrial-grade performance in a maker-friendly form.
✅ Key Features:
-
Input Voltage: 5.5V – 27V DC
-
Continuous Current: 43A (with heatsink)
-
Driver Chip: Dual BTS7960B half-bridges
-
PWM Frequency: Up to 25kHz
-
Control Logic: 3.3V / 5V compatible (Arduino, ESP, Pi)
-
Modes Supported: Forward, reverse, brake
-
Onboard Heat Sink: For thermal stability
-
Protection: Over-temperature & current protection
-
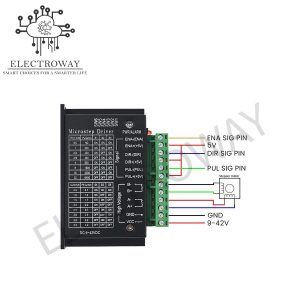
Control Interface: IN/EN pins with clear labeling
Find more components for your robotic builds in our Arduino and Accessories and Electronics Components sections.
🛠️ Typical Applications:
-
✅ High-torque robotic arms and platforms
-
✅ Electric go-karts and mobility vehicles
-
✅ CNC axis motor control
-
✅ Large DC motor automation
-
✅ Industrial conveyor and door systems
-
✅ DIY motorized wheelchairs
⚠️ Precautions:
-
Ensure proper heat dissipation during high-current use
-
Keep motor and logic grounds common
-
Avoid reverse polarity connections
-
Test with low speed before full-load testing
-
Use appropriately rated power supplies
Specifications:
- 100% brand new and high quality
- Quantity: 1pc
- Weight: 66 g
- Input voltage : 6V-27V
- Maximum Current : 43A
- Input level : 3.3V-5V
- Control mode : PWM or level
- Duty cycle: 0 to 100%
- Current conditioning output: yes
- Size:50mmx40mm/1.97″X1.58″(inch) (approx.)
📺 YouTube Tutorial:
🎥 BTS7960B Motor Driver Tutorial for Arduino
🏪 Shop Address:
Electroway, Johar Town (Near UMT), Lahore, Pakistan
📦 Nationwide shipping: Gujranwala, Rawalpindi, Quetta & beyond.

Reviews
There are no reviews yet.